@RIOTU_LAB

About Project
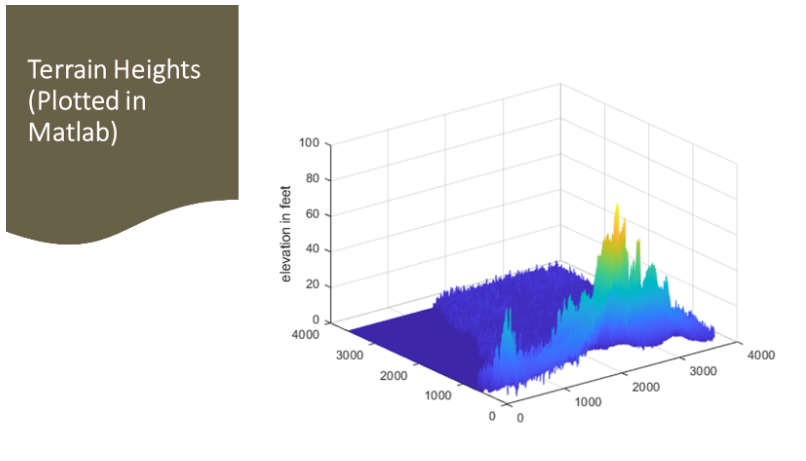
This project proposal is designed to advance the development of autonomous navigation schemes for Unmanned Aerial Vehicles (UAVs), in regions where traditional positioning systems, such as Global Positioning System (GPS) and stereo-vision technologies, are non-operational due to adversarial interference or systemic constraints. The proposed research will be centered on an innovative approach to localization, emphasizing the study and implementation of a Terrain Aided Navigation (TAN) algorithm as a primary navigation methodology. This technique involves the comprehensive use of terrain features to aid in navigation and is particularly advantageous in settings where GPS signals are inaccessible or unreliable.
Meet the dedicated professionals behind our groundbreaking work in autonomous drone system at the RIOTU Lab, Prince Sultan University.
1
Research Center Director
Prof. Anis Koubaa
2
Principle Investigator
Dr. Muhammad Bilal Kadri
3
Robotics Team Lead
Dr. Mohamed Abdelkader
4
Researcher
Eng. Wadii Boulila
5
Postdoc
Dr. Imen Jarraya
6
AI Senior Researcher
Dr. Adel Ammar
7
Research Engineer
Eng. Abdulrahman AlBatati
8
Research Engineer
Eng. Khaled Gaber
© Robotics and Internet-of-Things Lab.